

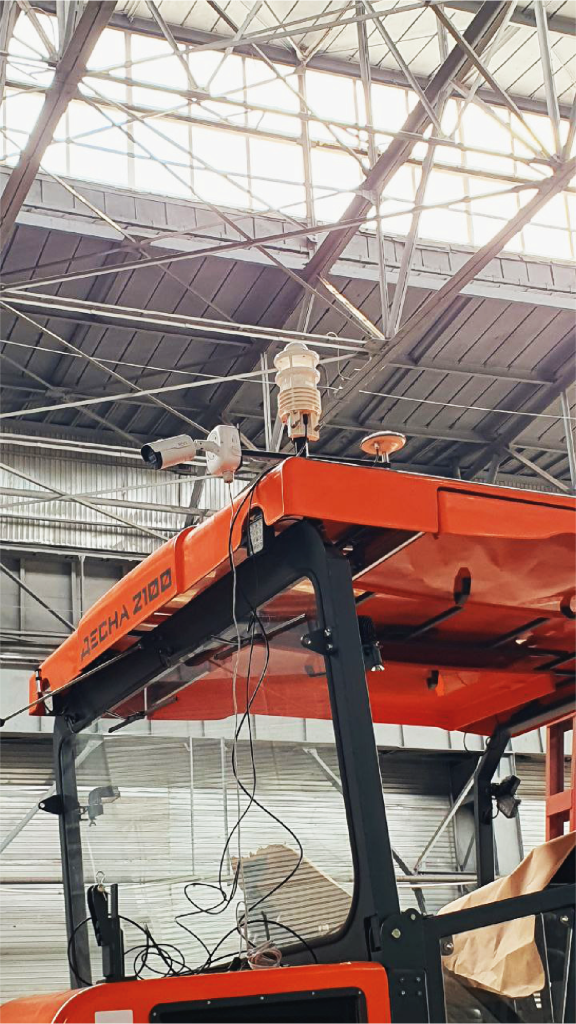








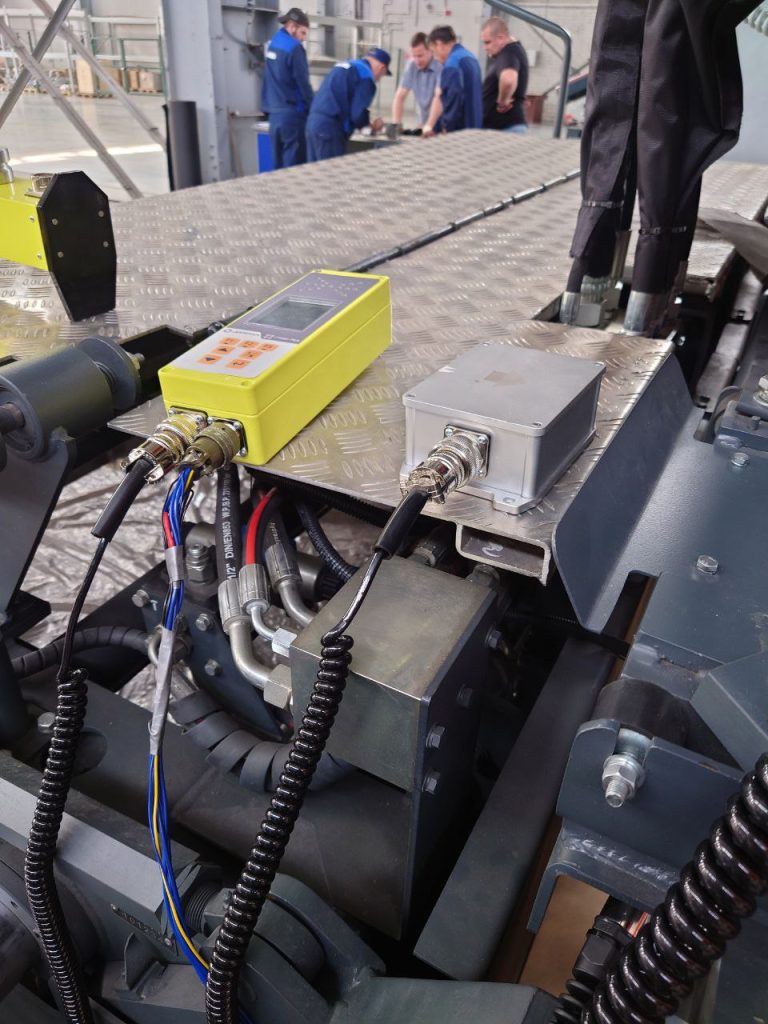



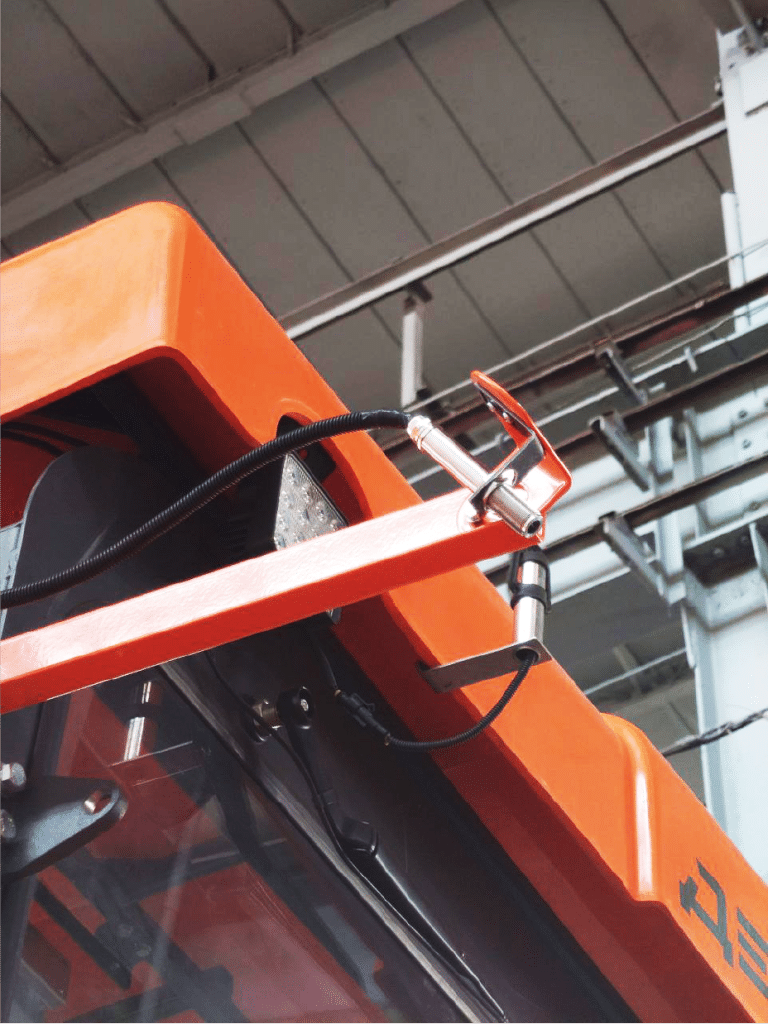

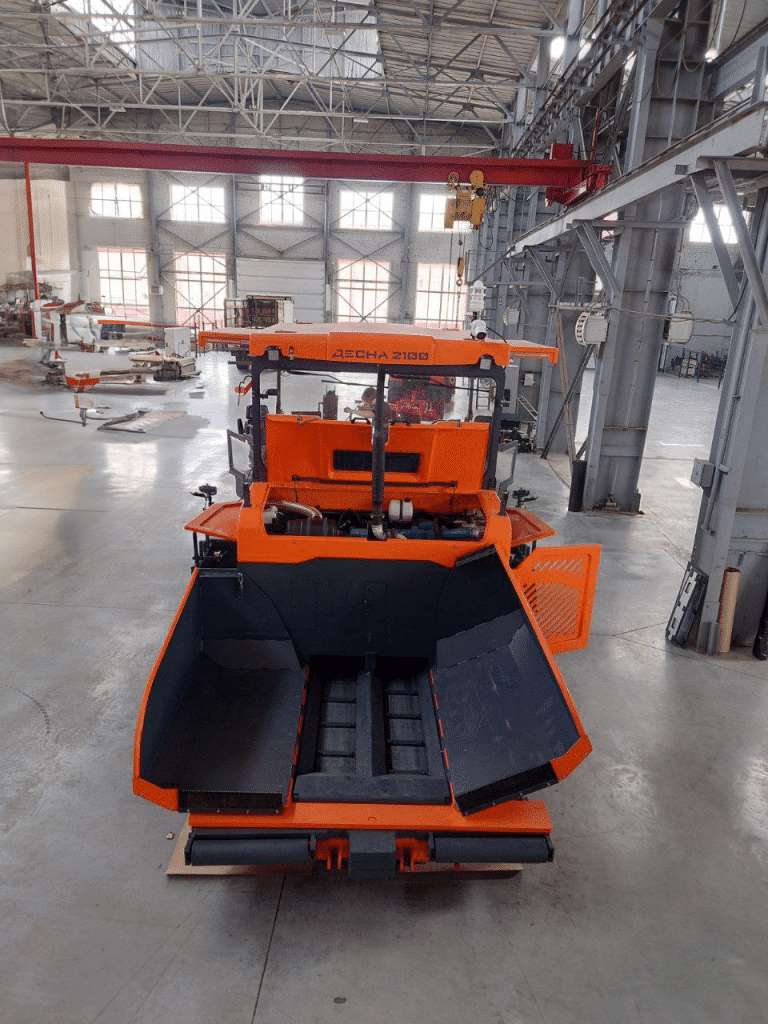




Первая дорожная фреза российского производства.
Одним из ключевых мероприятий в рамках проведения ежегодная конференция и выставка «Дорожное строительство в России. Дорожно-строительная техника, оборудование и материалы», которая пройдет 29 января 2026
В Минводы ЭКСПО завершилась крупнейшая отраслевая выставка «Дорога2025»
В Минводы ЭКСПО завершилась крупнейшая отраслевая выставка «Дорога2025», организованная при поддержке Министерства транспорта РФ.Грустно расставаться, но мы обязательно увидимся через год! Дистрибьютор ООО «ДСТ «ДЕСНА»отечественного

ВЫШЕЛ СЕНТЯБРЬСКИЙ НОМЕР ЖУРНАЛА «ДОРОГИ. Инновации в строительстве № 128»! Главная тема выпуска — настоящий прорыв в отечественном машиностроении! На страницах нового номера мы подробно